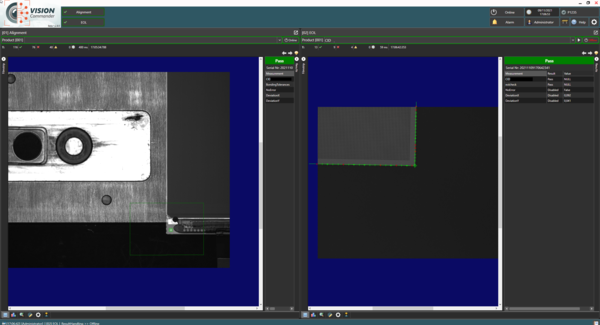


Das optische 2D-Messsystem von senswork sorgt für die korrekte Zuführung von Mikrochips in der Halbleiterindustrie. Entdecken Sie die Vorteile.

Sicherstellung der Zuführung von Mikrochips